 PDF(1616 KB)
PDF(1616 KB)

Optimal analytical and numerical approximations to the (un)forced (un)damped parametric pendulum oscillator
Haifa A Alyousef, M R Alharthi, Alvaro H Salas, S A El-Tantawy
Communications in Theoretical Physics ›› 2022, Vol. 74 ›› Issue (10) : 105002.
PDF(1616 KB)
 PDF(1616 KB)
PDF(1616 KB)
Optimal analytical and numerical approximations to the (un)forced (un)damped parametric pendulum oscillator
 ({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}
({{custom_author.role_en}}), {{javascript:window.custom_author_en_index++;}}The (un)forced (un)damped parametric pendulum oscillator (PPO) is analyzed analytically and numerically using some simple, effective, and more accurate techniques. In the first technique, the ansatz method is employed for analyzing the unforced damped PPO and for deriving some optimal and accurate analytical approximations in the form of angular Mathieu functions. In the second approach, some approximations to (un)forced damped PPO are obtained in the form of trigonometric functions using the ansatz method. In the third approach, He's frequency-amplitude principle is applied for deriving some approximations to the (un)damped PPO. In the forth approach, He's homotopy technique is employed for analyzing the forced (un)damped PPO numerically. In the fifth approach, the p-solution Method, which is constructed based on Krylov–Bogoliúbov Mitropolsky method, is introduced for deriving an approximation to the forced damped PPO. In the final approach, the hybrid Padé-finite difference method is carried out for analyzing the damped PPO numerically. All proposed techniques are compared to the fourth-order Runge–Kutta (RK4) numerical solution. Moreover, the global maximum residual distance error is estimated for checking the accuracy of the obtained approximations. The proposed methodologies and approximations can help many researchers in studying and investigating several nonlinear phenomena related to the oscillations that can arise in various branches of science, e.g. waves and oscillations in plasma physics.
parametric pendulum equation / Ansatz method / He's frequency-amplitude principle / He's homotopy technique / Krylov–Bogoliúbov Mitropolsky method / the hybrid Padé-finite difference method {{custom_keyword}} /
| 1 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 2 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 3 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 4 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 5 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 6 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 7 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 8 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 9 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 10 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 11 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 12 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 13 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 14 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 15 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 16 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 17 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 18 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 19 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 20 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 21 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 22 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 23 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 24 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 25 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 26 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 27 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 28 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 29 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 30 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 31 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 32 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 33 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 34 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 35 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 36 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 37 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 38 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 39 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 40 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 41 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 42 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 43 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 44 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 45 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 46 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 47 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 48 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| 49 |
{{custom_citation.content}}
{{custom_citation.annotation}}
|
| {{custom_ref.label}} |
{{custom_citation.content}}
{{custom_citation.annotation}}
|



 PDF(1616 KB)
PDF(1616 KB)
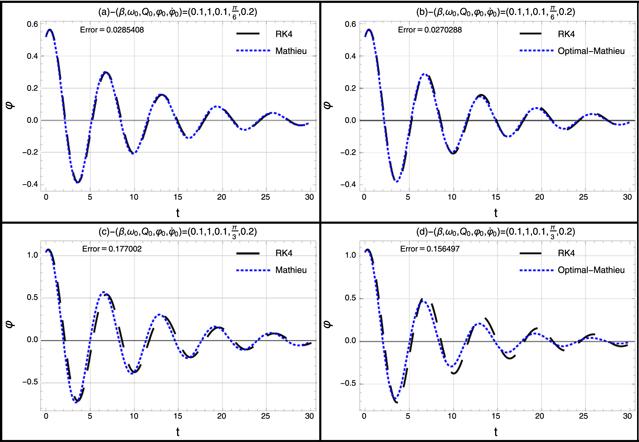
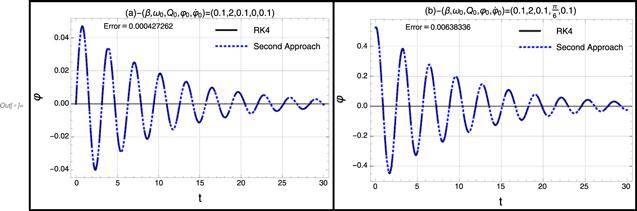
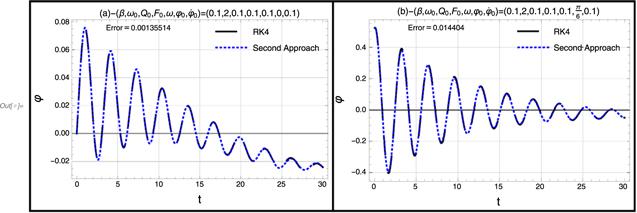
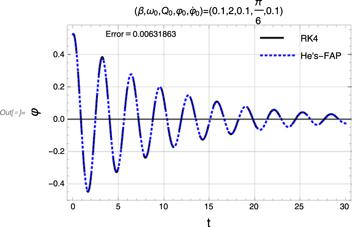
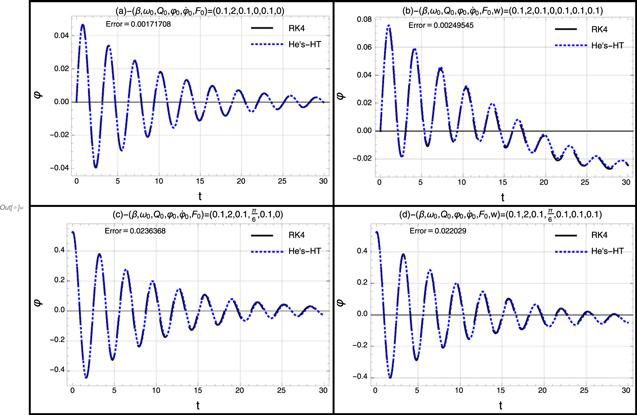
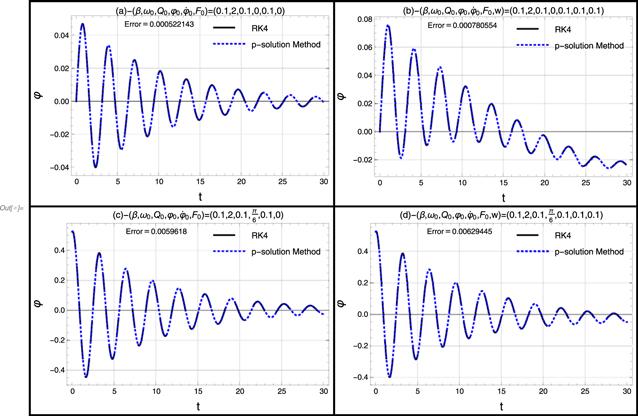
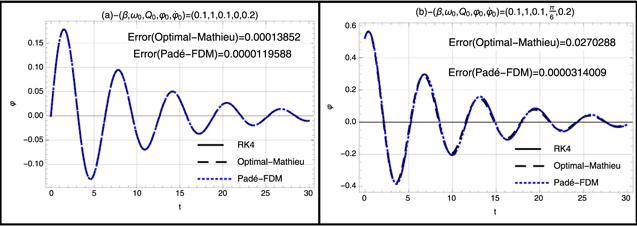
 Figure 1. The profile of two-analytical approximations (10) and (13) to the i.v.p. (4) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 2. The profile of the approximation (15) to the i.v.p. (22) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 3. The profile of the approximation (24) to the i.v.p. (23) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 4. The profile of the approximation (32) to the i.v.p. (29) is plotted against the RK4 numerical approximation for Figure 5. The profile of the approximation (38) to the (un)forced i.v.p. (36) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 6. The profile of the approximation (46) to the (un)forced i.v.p. (44) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 7. The profile of the numerical solutions using both Padé-FDM and RK4 method and the optimal analytical approximation (13) to the i.v.p. (2) for
Figure 1. The profile of two-analytical approximations (10) and (13) to the i.v.p. (4) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 2. The profile of the approximation (15) to the i.v.p. (22) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 3. The profile of the approximation (24) to the i.v.p. (23) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 4. The profile of the approximation (32) to the i.v.p. (29) is plotted against the RK4 numerical approximation for Figure 5. The profile of the approximation (38) to the (un)forced i.v.p. (36) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 6. The profile of the approximation (46) to the (un)forced i.v.p. (44) is plotted against the RK4 numerical approximation for different values to the ICs: Figure 7. The profile of the numerical solutions using both Padé-FDM and RK4 method and the optimal analytical approximation (13) to the i.v.p. (2) for /
| 〈 |
|
〉 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}