| 机器人气囊抛光去除函数稳定性分析 |
| |
| 引用本文: | 林泽文, 王振忠, 黄雪鹏, 等. 机器人气囊抛光去除函数稳定性分析[J]. 强激光与粒子束, 2021, 33: 051002. doi: 10.11884/HPLPB202133.200293 |
| |
| 作者姓名: | 林泽文 王振忠 黄雪鹏 孔刘伟 |
| |
| 作者单位: | 1.厦门大学 机电工程系,福建 厦门 361005;;2.厦门大学 深圳研究院,广东 深圳 518057 |
| |
| 基金项目: | 深圳科技计划项目(JCYJ2018030617) |
| |
| 摘 要: | 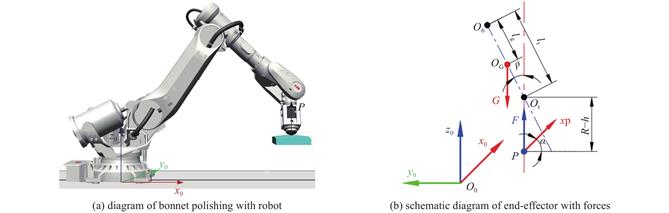
基于气囊抛光技术和工业机器人平台开发光学元件精密抛光系统,既能满足光学元件快速抛光环节的高效率和高精度的要求,又可以降低开发成本,是极具潜力的抛光设备开发方案。气囊抛光具有稳定的且确定的材料去除特性,通常要求抛光斑稳定性在90%左右。针对机器人气囊抛光系统在多步离散进动抛光过程中机器人末端刚度对气囊抛光稳定性的影响展开研究,通过建立机器人末端刚度矩阵,获得机器人末端变形;基于Preston理论,建立含变形误差的气囊抛光去除函数。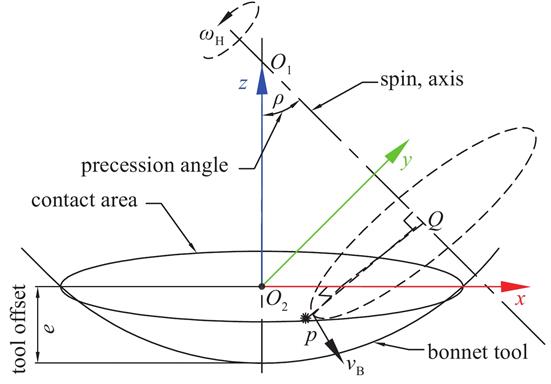
最后设计4步离散定点抛光实验验证机器人气囊抛光系统稳定性。根据结果可知抛光斑在XY截面轮廓线上皆呈类高斯形状,且XY截面轮廓线基本一致,具有比较好的重合度;对比不同抛光位置的截面轮廓线,其相对误差小于5%,由此可验证机器人气囊抛光系统在离散进动抛光时具有较好的稳定性。

|
| 关 键 词: | 气囊抛光 工业机器人 刚度矩阵 去除函数 抛光实验 |
| 收稿时间: | 2020-10-26 |
| 修稿时间: | 2021-04-02 |
| 本文献已被 CNKI 万方数据 等数据库收录! |
| 点击此处可从《强激光与粒子束》浏览原始摘要信息 |
|
点击此处可从《强激光与粒子束》下载免费的PDF全文 |
|