|
|||||
|
|
| 能量值和方位信息结合的粒子滤波算法 | |
| 引用本文: | 郑策, 董超, 郑兵, 陈焱琨, 贺惠忠. 面向方位历程交叉场景的多目标检测前跟踪方法[J]. 声学学报, 2024, 49(5): 990-1004. DOI: 10.12395/0371-0025.2023031 |
| 作者姓名: | 郑策 董超 郑兵 陈焱琨 贺惠忠 |
| 作者单位: | 1.自然资源部海洋环境探测技术与应用重点实验室 广州 510300;2.自然资源部南海调查中心 广州 510300;3.南方海洋科学与工程广东省实验室(珠海) 珠海 519000 |
| 基金项目: | 国家自然科学基金项目 (62401171)和自然资源部海洋环境探测技术与应用重点实验室自主设立课题 (MESTA-2021-D002)资助 |
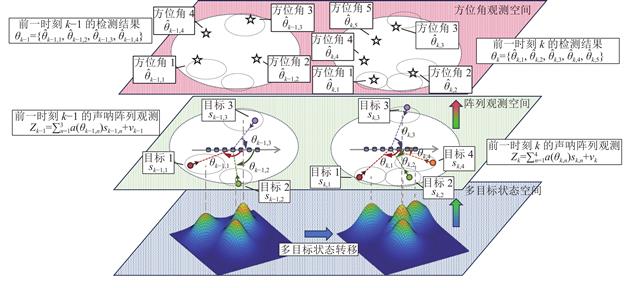
| 摘 要: |  针对传统先检测后跟踪方法在多目标方位历程交叉时存在轨迹中断或者误跟的问题, 提出了一种基于广义标签多伯努利滤波的多目标检测前跟踪方法。该算法直接利用声呐基阵接收数据构造的协方差矩阵作为观测, 无需波束形成等预处理技术, 构建了轨迹新生、消亡、演变及观测过程的概率模型, 并通过原理性近似消除了更新步骤的多维积分运算, 实现了联合多目标检测、方位跟踪与航迹管理。  |
| 关 键 词: | 检测前跟踪 阵列信号处理 方位跟踪 标签随机有限集 广义标签多伯努利滤波 |
| 收稿时间: | 2023-02-28 |
| 修稿时间: | 2023-06-27 |
| 点击此处可从《声学学报》浏览原始摘要信息 | |
| 点击此处可从《声学学报》下载全文 | |