|
|||||
|
|
| 动态环境下改进人工势场法的仓储机器人自主导航系统研究 | |
| 引用本文: | 兰鸿辉, 卢海林, 乔璐等. 基于力流和有限元法的路径规划. 力学与实践, 2024, 46(5): 956-962. DOI: 10.6052/1000-0879-23-618 |
| 作者姓名: | 兰鸿辉 卢海林 乔璐 王倩 |
| 作者单位: | 武汉工程大学土木工程与建筑学院,武汉 430074 |
| 基金项目: | 武汉工程大学研究生教育创新基金项目(CX2022206)资助。 |
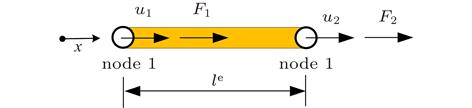
| 摘 要: | 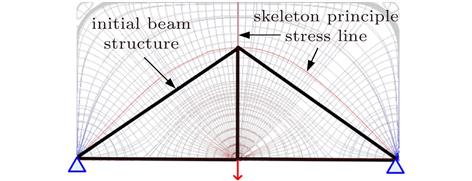 提出了一种基于力流和有限元法的路径规划方法,旨在解决复杂环境下全局路径规划的问题。将地图等效为由杆单元构成的桁架结构,在起点和终点处施加静定约束条件和相互作用力,通过捕捉点到点的力流解决避障和路径规划问题。力在物体中的传递遵循最短路径原则,因此力流路径不会偏离最优路径太远。 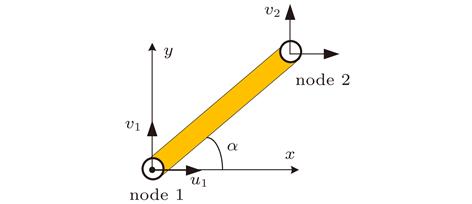 |
| 关 键 词: | 路径规划 力流 有限元法 杆单元 |
| 收稿时间: | 2023-11-27 |
| 修稿时间: | 2024-01-04 |
| 点击此处可从《力学与实践》浏览原始摘要信息 | |
| 点击此处可从《力学与实践》下载全文 | |