|
|||||
|
|
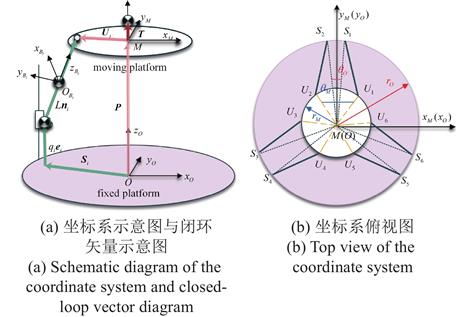
| 6-UPS并联机器人动力学参数辨识 | |
| 引用本文: | 谢兴彪, 张晓旭, 孙秀婷, 徐鉴. 6-PSU并联机器人动力学模型辩识及其驱动力矩估计新方法. 力学学报, 2025, 57(1): 1-16. DOI: 10.6052/0459-1879-24-416 |
| 作者姓名: | 谢兴彪 张晓旭 孙秀婷 徐鉴 |
| 作者单位: | *.复旦大学工程与应用技术研究院, 上海 200433;†.复旦大学智能机器人教育部工程研究中心, 上海 200433;**.同济大学航空航天与力学学院, 上海 200092 |
| 基金项目: | 国家自然科学基金资助项目(12372022和12372065) |
| 摘 要: |  并联机器人运动奇异常常会导致电机驱动力矩过载甚至损坏.为降低驱动电机的故障率, 以6-PSU型并联机器人为研究对象, 提出了基于动力学建模及其参数辨识的解决方案, 能够根据预设轨迹提前精确估计驱动力矩以便用于安全性校核.  |
| 关 键 词: | 并联机器人 凯恩方法 关节摩擦 激励轨迹优化 参数辨识 |
| 收稿时间: | 2024-08-27 |
| 点击此处可从《力学学报》浏览原始摘要信息 | |