| 摘 要: | 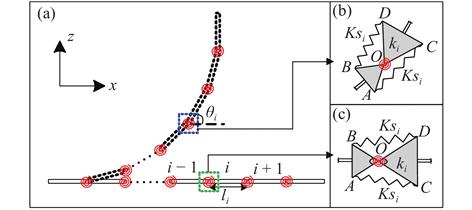
由于生物能够通过丰富的运动形式完成特定的任务, 仿生设计方法受到了学者们的广泛关注. 蚯蚓在各种环境中具有出色的移动能力和适应性, 受此启发, 仿蠕虫机器人被提出并应用在搜救、医疗等领域. 然而现有的仿蠕虫机器人一般通过体节的轴向变形实现直线运动, 无法实现类似蛇类生物的起竖功能. 为了解决现有的仿蠕虫机器人无法起竖的问题, 本文提出了一种具有非线性多稳态性质的仿生柔性关节, 并在此基础上构建了多节仿生起竖结构以实现类似尺蠖、蛇等生物的起竖功能.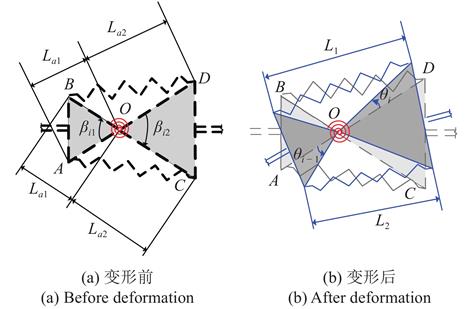
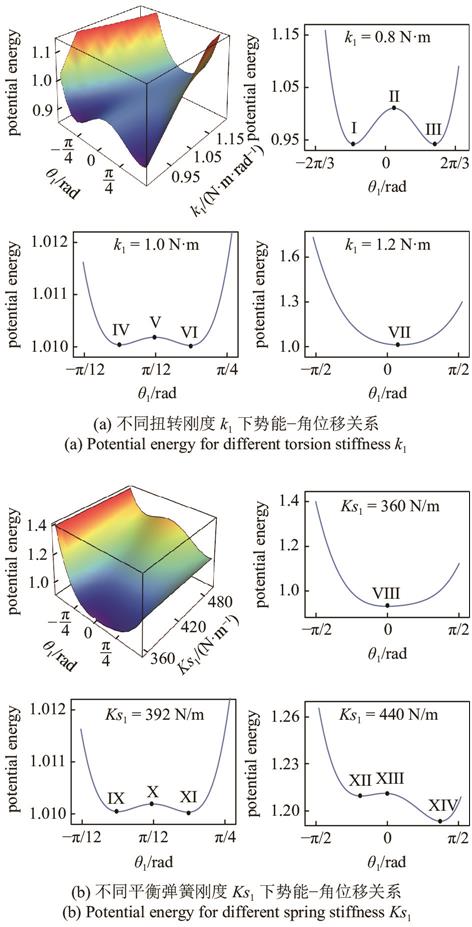
首先, 本文提出了一种仿生起竖关节模型, 推导了多节仿生起竖结构的总势能表达式, 从而建立了多节仿生起竖结构的动力学模型; 随后, 基于多节仿生起竖结构总势能的表达式和多元函数极值原理, 提出了实现需求起竖构型的结构参数设计准则, 利用动力学模型验证了结构参数设计准则的有效性, 并研究了需求构型的触发条件; 最后, 针对不同起竖节数的设计需求, 设计了相应节数的仿生起竖结构. 研究结果表明, 结构参数设计准则能够使得多节仿生起竖结构达到需求的仿生起竖构型, 并在需求构型处保持稳定平衡; 此外, 定义了初始激励与起竖构型的比例系数单调性变量, 并基于仿生起竖结构不同稳态的吸引盆揭示了上述变量构成的构型触发准则, 这为仿生起竖结构的构型切换提供了理论依据. 本文提出的仿生起竖结构对仿蠕虫机器人的功能拓展具有参考价值和指导意义, 也是对仿生设计理论的进一步完善.
|